高速公路收费系统远程智能控制技术探究
关 注

作者:易术1,黄兴中1,张毅1,葛泓2(1.四川智能交通系统管理有限责任公司;2.中国人民大学)
摘要:当前我国高速公路已经进入“一张网运行、一体化服务”的新阶段。传统收费系统体系架构已不能很好地适应新时代发展需要。本文通过对比传统及新一代收费系统体系架构,全面分析了基于“云-边-端”架构的新一代收费系统体系架构的优势和应用难点,结合信息技术发展,提出基于自主可控的龙芯处理器及嵌入式系统的远程智能控制技术,可有效提高新一代收费系统架构下边端协同效率,同时也可解决新架构推广应用中的关键痛点。该技术已在四川省高速公路联网收费系统中加以实现。
2020年初取消高速公路省界收费站后,全国高速公路进入“一张网运行、一体化服务”的新阶段。随着ETC用户量快速增长、驾乘人员对收费站高效通行需求不断提升,收费数据在线化运营及精准化、智能化、人性化的收费服务将成为主流。如何提高收费系统集成度、降低系统运行维护难度,用集约化理念建设新一代集成化收费系统,越来越受到业界的高度重视。传统高速公路收费系统采用多级架构,多级架构中的每一级系统均具有完整的独立事务处理能力。在联网收费模式下,车道级系统必须存储整个路网的全局信息。随着省界收费站的消失,路网规模瞬间从省域扩展到全国,全局信息量巨量增长,这一变化引发的一系列问题使传统收费系统架构面临巨大挑战。本文将探讨基于“云-边-端”的高速公路联网收费系统的总体架构,分析利用该架构解决传统高速公路收费系统问题的可行性及该架构在其他方面的优势及应用难题。
传统收费系统体系架构及问题分析
传统高速公路联网收费系统一般由“联网收费结算中心、路段收费中心、收费站、收费车道”四级系统构成。收费车道级系统的控制核心是车道控制器,一般采用基于X86体系架构的工业控制计算机(工控机),按以下模式工作:工控机I/O端口实现对车道设备的控制驱动和数据采集等功能;联网收费费率表等全局数据均存储于工控机上,确保当收费车道系统与上级系统通信联络中断时,能独立完成通行费计算和收取。这种体系架构经多年现场应用,总体较为成熟,但也存在以下固有缺陷:
1、相对于服务器,工控机的性能偏弱,当路网规模显著增大时,其计算性能难以令人满意,造成服务体验降低;
2、所有工控机均需单独安装操作系统和应用软件,分别维护包括费率表在内的全局数据。不仅造成硬件资源的堆积浪费,也大大增加了系统维护的整体工作量和系统维护难度,在全国一张网运行情况下,这一问题显得更加突出;
3、底层控制实时性不佳。由于工控机普遍采用Windows、Linux等操作系统,这类系统均为分时操作系统,其中断处理响应及多任务调度机制主要为适应桌面或服务器应用设计,难以满足高标准现场控制的实时性要求;
4、抗恶劣工作环境的能力不能令人满意。虽然工控机也针对恶劣工作环境进行了加固、防尘、防潮、防腐蚀、防辐射等特殊设计,但广泛使用于车道的低成本工控机的加强措施主要针对机箱、电源、底板等辅助设施,对核心的CPU和操作系统与普通个人计算机并没有本质差别。因此,工控机在实际工作中故障概率不低;
5、未满足自主可控要求。工控机的基础软硬件普遍基于X86+Windows平台,非自主可控技术体系。
基于“云-边-端”的收费系统架构
为适应全国高速公路联网收费新情况和新要求,解决工控机作为车道控制核心所存在的问题,本文分析了基于“云-边-端”架构的新一代收费系统体系架构。总体分为三级,由上而下分别是“端”级、“边”级和“云”级。具体架构如下:
1、“云”级:采用云计算和大数据技术,构建联网收费云平台,实现高速公路收费系统核心信息资源的集中安全管理;
2、“边”级:将设置在收费站的计算资源、存储资源和网络资源虚拟化,构建“站级边缘云”。联网收费的费率表等全局数据集中存储在“站级边缘云”上。“站级边缘云”可以根据实际需要,为具体的收费车道分配必要的计算和存储资源,构成收费车道的“虚拟服务器”,从而可读取费率表等全局数据,负责完成通行费计算、收取等业务流程;
3、“端”级:不再使用基于X86+Windows的工业计算机作为控制核心,而是采用基于自主可控CPU+嵌入式实时操作系统的智能控制器作为控制核心。“端”级系统只负责对收费车道设备进行控制驱动和数据采集,不再存储全局数据,不再负责通行费计算。
与传统收费系统体系架构的比较
基于“云-边-端”架构的新一代收费系统与传统的收费系统相比,主要优势在于:
1、极大降低运维工作量和难度。“端”级系统采用业务应用与底层控制逻辑相分离的体系,车道不再部署收费应用软件,无需存储联网收费费率表等全局数据。全局数据和应用软件均集中部署在“边”级系统,全网参数只需下发到站级服务器中,有利于运维人员核查,避免车道参数升级不成功导致计费异常等问题,从而大大减少了联网收费系统维护的整体工作量,降低了维护难度;
2、收费系统整体性能和扩展能力大幅提升。车道收费应用软件运行所需的计算资源和存储资源由“站级边缘云”按需配置,在云计算技术支撑下,通过“站级边缘云”扩容升级,可为收费车道提供更为强大的计算能力支撑,实现收费系统整体性能的提质升级,也更为便利地满足收费车道增加、路网扩容所带来的收费车道计算资源和存储资源升级需求。
3、传统体系架构中,车道级系统在与站级系统通信中断的情况下,具有完整的独立处理能力。但从实际应用情况来看,车道级系统运行过程中,基于工控机技术的车道控制器本身的故障率远高于通信设备故障率。而基于“云-边-端”的体系架构亦可以通过通信设备和智能网关的集群部署,大幅降低通信设备的总体故障率。因此,基于“云-边-端”的体系架构的总体可靠性高于传统的体系架构。
自主可控的远程智能控制器技术实践
新一代收费系统体系架构中,“边-端”级系统由后台站级系统和前端车道设备组成。后台站级系统主要包括站级交易系统和站级管理系统,站级系统并行处理站内所有车道收费业务、车道外设的控制监测,通过标准化网络协议对所有车道设备集中处理和控制。
“边-端”协同技术是新收费系统架构在工程中成功应用的关键。为提高边端协同效率、降低改造成本和施工难度,方便完成日常维护、增强系统应急处理能力,系统采用了基于自主可控底层软硬件技术的车道控制器,作为车道外部设备的汇聚及协议转换核心。车道控制器完成“边-端”协议的封包上传和接收解析,承担外部设备的数据采集和伺服驱动。
(一)车道控制器设计原则
新一代车道控制器的设计重点立足七项原则:自主可控、高安全、高效率、高可用性、高稳定性、高性价比、易维护性。
(二)底层基础技术选择
新一代智能车道控制器采用嵌入式计算设备,主要涉及三个方面的核心技术:自主可控基础硬件技术、自主可控基础软件技术、自主可控应用软件技术,如图1所示。各个模块具体构成包括:
1、自主可控基础硬件:处理器体系结构和处理器;
2、自主可控基础软件:操作系统和应用开发环境;
3、自主可控应用软件:应用软件。

图1 车道控制器软硬件环境层次
智能车道控制器通过自主开发的软件实现网络协议转换和车道设备驱动及采集。经多方调研和综合比选,控制器采用了龙芯2K1000LA嵌入式处理器及其配套嵌入式操作系统Loongnix Embedded,作为构建车道控制器的基础软硬件。
(三)高可用性及易维护性
车道控制器中内置BMC(Board Monitor Controller)功能模块。控制器对BMC独立供电,BMC通过挂接在I2C总线上各类传感器完成对板内温度、电压等状态的采集。
(四)安全性
2K1000LA处理器内置加密引擎,通过DES控制器、AES控制器、RSA控制器和RNG控制器,可以在16至48个时钟周期内完成DES3加解密,或在15个时钟周期内完成256位的AES加解密。
除收费系统顶层设计中信道加密和物理隔离等措施外,应用开发人员还可以充分利用2K1000LA内置加密引擎为车道控制器提供高效的信源加密手段,以便必要时以信源加密方式进一步提高车道数据及控制指令传输的安全性。
(五)智能车道控制器实现方案比较
业内解决边端协同技术主要有两条技术路线:一是全设备IP化方案,二是基于智能网关路线方案。全设备IP化方案改造成本高,在实施收费站升级改造中需更换设备,该方案不纳入比较。基于智能网关路线的多种技术方案中,本文将嵌入式技术研发智能车道控制器方案与其他实现方案的优缺点进行对比。
四种智能网关实现方案分别为:软转换方案,采用传统的PC/IPC车道控制器;PLC方案,采用工业可编程控制器(PLC)实现车道控制器;RTU方案,采用工业用远程终端单元(RTU)实现车道控制器;专用控制器方案,采用嵌入式系统技术、面向高速公路收费系统设计开发的专用车道控制器。
本文主要从环境适应性、结构尺寸、端口能力、灵活性、可靠性、安全性、易维护性、自主可控维度对上述四种方案进行对比,对比结果如表1所示。
表1 四种车道控制器实现方案的对比
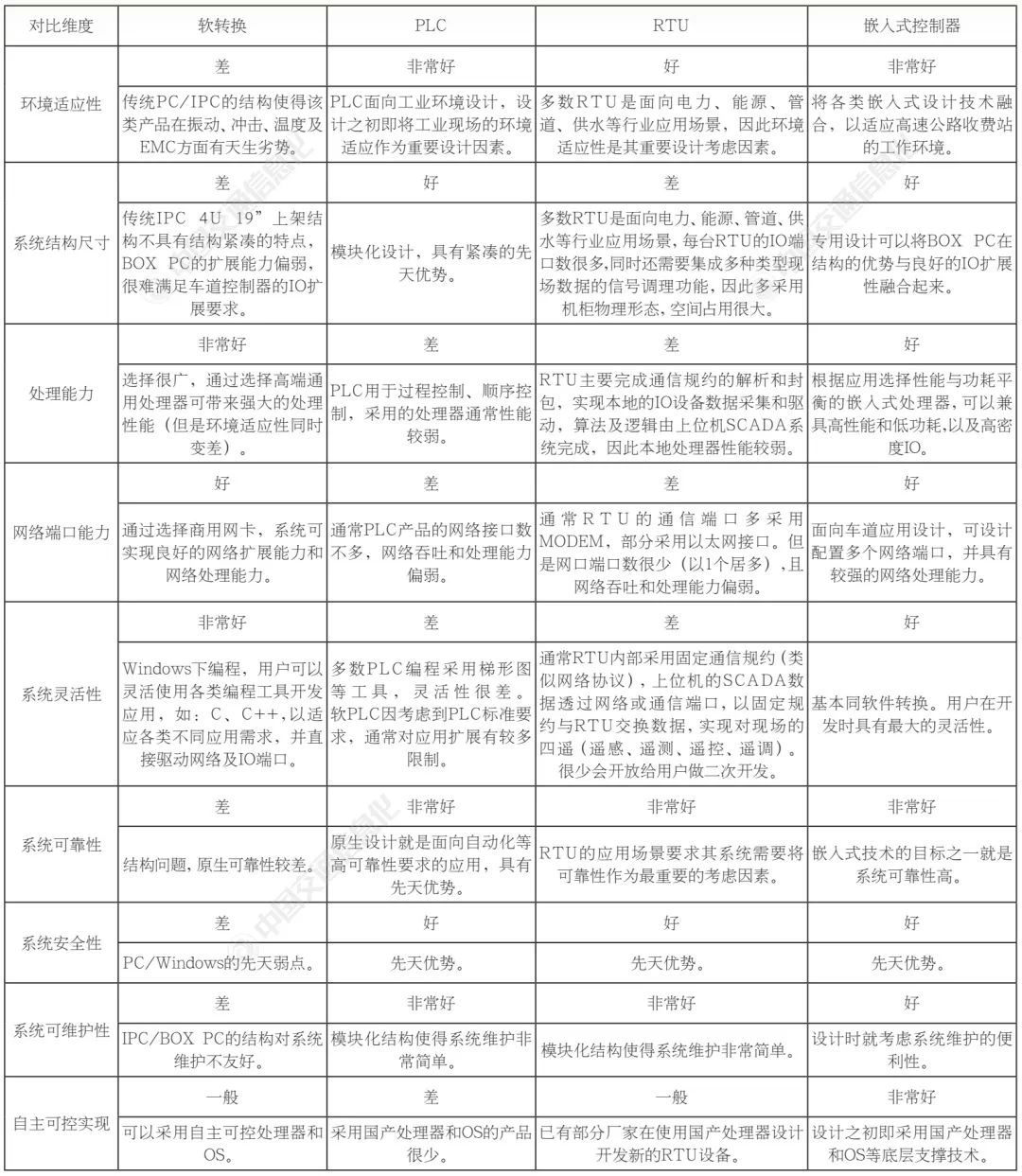
从表1中对比结果可以看到,软转换方案在系统结构尺寸、可靠性、安全性、可维护性等方面的劣势明显;PLC方案在网络性能和扩展能力、自主可控等方面难以满足要求;RTU方案在处理性能、网络扩展能力以及自主可控方面存在先天不足;采用嵌入式技术设计开发专用车道控制器在各项维度对比中都有较好的表现。因此,采用国产自主底层技术设计专用嵌入式车道控制器是比较优势的技术路径。
实验测试与验证
为验证嵌入式车道控制器技术路线的可行性及实际性能表现,控制器在前期设计了两组实验测试。单一车道在单位时间内能够通过的最大车辆数量是判定高速公路收费站车道通行能力的重要指标,车道控制器的处理能力直接关系到收费流程处理时间的长短,影响驾乘人员通行体验,更体现收费站服务水平。为此两组实验均选择收费流程处理时间作为关键的性能指标。
1、数据传输模拟测试
实验中,采用基于2K1000LA处理器的单板计算机(FTV-5301)、一台Windows/X86笔记本电脑及一台网络交换机搭建模拟测试系统,其中单板计算机模拟车道控制器,笔记本电脑模拟边系统,图2为模拟试验拓扑示意图。实验选择了两类不同的数据类型,第一类128字节,第二类6M字节。其中,第一类为短数据包,模拟开关量、边服务器系统指令等,第二类为长数据包,模拟照片、图像数据等。试验分别采用TCP和UDP协议,其中TCP用于短数据包传输,UDP用于图形/图像数据传输。
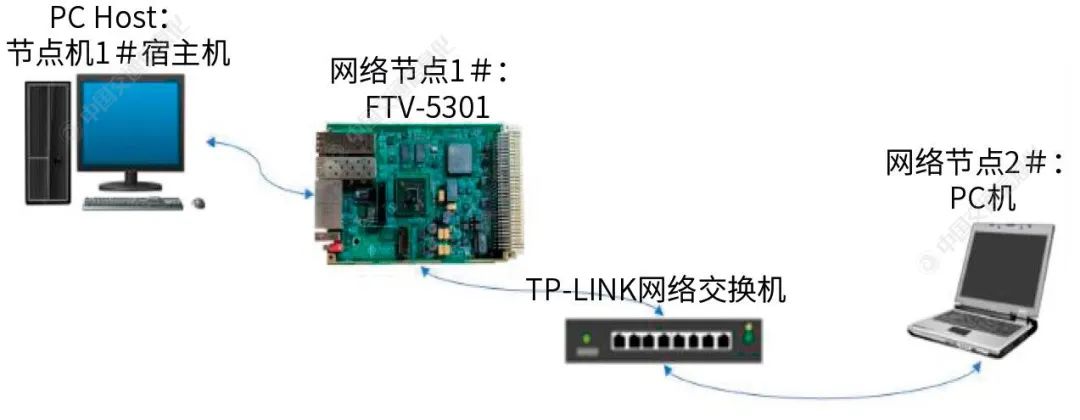
图2 2K1000LA网络传输延时及带宽模拟测试示意图
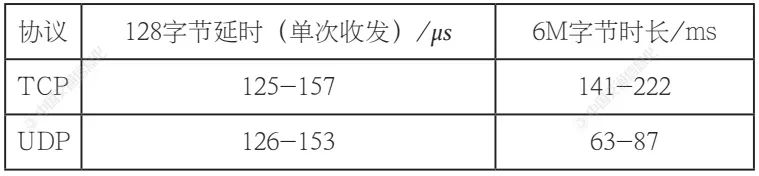
如表2所示,试验结果表明,TCP协议下2K1000LA的网络延时在160μs以内,UDP协议下2K1000LA的网络带宽约为680Mbps。
表2 数据传输模拟测试结果
2、“端-边”模拟测试
为更加真实地反映新一代车道控制器实际工作状态,实验中进一步选择最为复杂的ETC收费业务进行模拟测试。模拟系统由网络交换机、端服务器、车道控制器模拟装置及RSU模拟装置构成,其中,车道控制器模拟装置采用龙芯2K1000LA处理器的单板计算机模拟。
模拟测试将ETC车辆通过车道时收费业务涉及的完整关键软硬件动作为定义为一个交易。作为对照,在对采用车道控制器的“端-边”模式测试后,同时记录使用网络直联模式(边服务器直接连接外部设备)做相同业务处理结果。测试分别在三个不同时间段进行交易模拟,每个时间段为一组、每组模拟交易次数不低于100次。
从表3所示模拟测试统计结果可以看到,采用由龙芯2K1000LA处理器及Loongnix Embedded嵌入式操作系统的车道控制器模拟实现的“端-边”计算模式,在处理最为复杂的ETC收费交易时,控制器引入的延时平均不超过3毫秒。这个延时相对于驾驶员的感官体验基本上可以忽略。
表3 “端-边”模拟测试结果

从上述两项试验的结果可以证明,在新型车道控制器开发中采用嵌入式技术路线,在网络处理性能上完全可以满足新一代车道控制器对综合处理性能的要求。
结束语
通过对“云-边-端”模式下新型联网收费系统基础架构的深入探究,结合现有高速公路收费模式、收费站运营方式与大数据云平台发展趋势,提出对收费站运营方式、车道收费方式、收费数据落地方式与其他数据传输方式进行创新的升级路径。在提升收费系统协同的时效性、精确性、灵活性和合理性的同时,简化了收费系统层级,提升了收费系统维护的便利性。
本文进一步对采用自主可控技术实现“边-端”协同车道控制器的关键技术进行了深入分析。通过采用龙芯2K1000LA嵌入式处理器搭建的系统,模拟高速收费系统的典型应用场景,从功能、性能、实时性、安全性等方面对自主可控技术的可行性、适用性进行模拟验证测试。实验结果表明,采用自主可控技术构建的新型收费系统完全能够满足交通运输部技术要求和可预期未来的发展需要。本文对未来高速公路新架构收费系统采用自主可控技术的适用性和可行性提供了参考决策依据。

